Software Overview
USB Drivers
ESP32 (CH340)
In order to interface with the ESP32 module, the USB driver for the CH340 USB-to-Serial converter must be installed. Users can be download the USB driver from the manufacturer's website:
Linux
A USB driver should not be required for most Linux based operating systems; the standard Linux CDC-ACM driver is usually sufficient. However, if necessary, users can try the USB driver below:
CH341SER_LINUX.ZIP
mosaic-X5
In order to interface with the mosaic-X5 on Windows computers, a USB driver must be installed.
-
Windows
The USB driver for the mosaic-X5 module can be installed through two methods:
- RxTools Software Suite (1)
- mosaic-X5 GNSS Receiver Module (2)
- The driver is installed during the installation process.
- The installation file for the Windows USB driver will be available from the mass-storage device when the board is initially connected to the computer.
Having Trouble?
For users who are having trouble installing the USB driver, we have an archived version (v3.0.2) of the installation file. Users can download version 3.0.2 of the driver, by clicking on the button below.
Download USB Driver (v3.0.2) Latest Driver
This driver version was archived at the time that the mosaic-X5 hookup guide was written. Please do not request for the file to be updated.
For the latest USB driver from Septentrio, please install their driver through the RxTools software suite.
Linux
On Linux, the standard Linux CDC-ACM driver is suitable for the mosaic-X5 module.
ESP32
Terminal Emulator
In order to configure the WiFi settings on the ESP32, users will need to install a terminal emulation program on their computer.
For Windows computers, we highly recommend TeraTerm.
Some Linux operating systems will already have the screen terminal emulator preinstalled.
Need Directions?
Check out our hookup guide to install your favorite terminal emulator:
-

Serial Terminal Basics
RTK Everywhere Firmware
System Configuration
Out of the box, the SparkFun RTK products are exceptional GNSS receivers out-of-box and can be used with little or no configuration. Additionally, the line of RTK products from SparkFun are immensely configurable. Please see the SparkFun RTK Everywhere Firmware Manual for detailed descriptions of all the available features on the RTK products
Firmware Updates and Customization
The RTK Facet mosaic is completely open-source meaning you have total access to the firmware code and hardware designs.
From time to time SparkFun will release new firmware for the RTK product line to add and improve functionality. We've made updating the firmware as easy as possible. Please see Updating RTK Firmware for a step by step tutorial.
Bluetooth and NTRIP
The RTK Facet mosaic transmits full NMEA sentences over Bluetooth serial port profile (SPP) at 4Hz and 115200bps. This means that nearly any GIS application that can receive NMEA data over serial port (almost all do) can be used with the RTK Facet mosaic. As long as your device can open a serial port over Bluetooth (also known as SPP) your device can retrieve industry standard NMEA positional data.
Please see the SparkFun RTK Everywhere Firmware Manual for step by step instructions.
mosaic-X5
RxTools Software Suite
Even if you aren't necessarily interested in it, we highly recommend that users install the RXTools software suite before connecting to the mosaic-X5. For Windows PCs, it also includes the USB driver for the module that enables the Ethernet-over-USB support and virtual COM ports.
System Requirements1
- Windows 7
- Windows 8
- Windows 10
- Fedora 23 (or later) using Qt technology.
- The standalone tools (except
bin2asc) will run on older distributions.
- The standalone tools (except
The minimal hardware requirements (1Hz update2):
- CPU: 1 GHz processor
- RAM: 1 GB RAM
- Screen Resolution: 1024×768 or higher resolution
Installation Instructions1
Users can install RxTools software suite by running the installation executable3(1), located in the RxTools\windows directory of the downloaded *.zip file4. During the installation process, users will be notified if a previous version of RxTools is already installed then the previous version will be uninstalled. Next, users will need to provide an installation directory for the RxTools software suite. Users will then select which of the following applications5 are installed:
- For RxTools v22.1.0, the installation filename is
RxTools_22_1_0_Installer.exefor Windows PCs.
- RxControl
- SBF Converter
- SBF Analyzer
- RxLogger
- RxUpgrade
- RxDownload
- RxPlanner
- Data Link
- RxAssistant
- RxLauncher
Warning
It is recommended that users NOT install RxControl as root, for security reasons and to avoid installation overwrites of other system settings. To make RxTools available to more than one user, provide a shared installation directory.
Users can install RxTools software suite by running the installation binary3(1), located in the RxTools/linux-i386/ directory of the downloaded *.zip file4. During the installation, users will be prompted for an installation directory. If there are any previous installations of RxControl, please use a different directory to avoid conflicts.
- For RxTools v22.1.0, the installation filename is
RxTools_22_1_0_Installer.binfor Linux.
Permission Settings
Once installed, users may need to reconfigure their permission settings:
-
RxTools will need rights to access the
/dev/ttyS*serial ports.-
To access the serial ports, users must be part of the
uucpandlockgroups (1). This can be configured by editing the/etc/group6 file and adding the username to the lines defining theuucpgroup and thelockgroup.For example, when adding the user
jsmithto theuucpgroup, users would modify the/etc/groupfile as shown below: -
On Linux machine administered centrally on a local network, ask your system administrator to be included in the
uucpandlockgroups.
-
-
RxTools also needs read/write (
rw) access(4) to the/dev/ttyS*serial ports.-
Users can change the permissions with the
chmod7 command:
-
- On most Linux operating systems, the
/dev/ttyS*devices are owned byrootand belong to theuucpgroup with read/write (rw) access. Additionally, the devices are normally locked by writing a file in the/var/lock/directory, with the same permissions. - Remove
- Replace with this line
- By default, users will normally have read/write (
rw) access to the/dev/ttyS*serial ports. - where users must specify the port number
e.g./dev/ttyS0might be portCOM1
Note
In order for these changes to take effect, users must update their environment by logging out and back in.
Be aware that the X-session has to be restarted as well. On most systems, this can be done by pressing the key combination Ctrl + Alt + Backspace
64-bit OS
In order to run the RxTools on a 64-bit Linux operating system, users might have to install the 32-bit version of the C standard library.
- For Fedora installations, this is the
glibc.i686package. - The equivalent for Debian(/Ubuntu) installations is the
ia32-libspackage.
Web Interface
With the USB driver installed, the mosaic-X5 module supports Ethernet-over-USB. The default IP address allocated for the Ethernet-over-USB interface is 192.168.3.1. This IP can be entered in any browser to open a connection to the receiver's Web Interface as shown below.
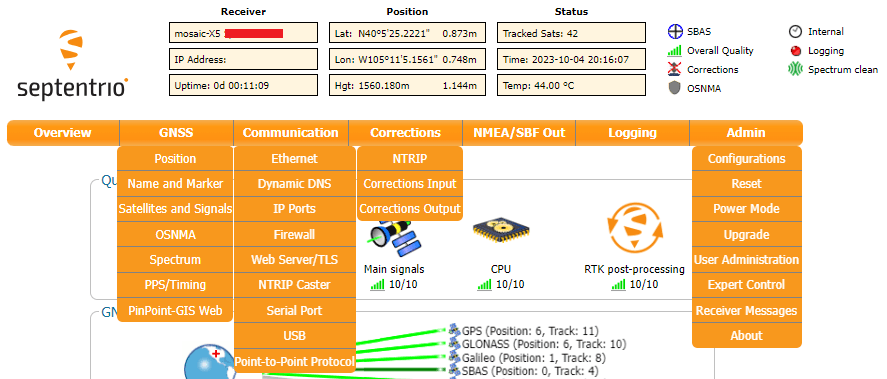
All the drop-down navigation tabs in the web interface.
Info
The default IP address cannot be changed; this feature is only to be used when a single receiver is connected to your computer.
PyGPSClient
As an alternative to GIS apps on mobile devices, for users with computers, we recommend PyGPSClient as an option for viewing the data from the NMEA messages and connecting to an NTRIP caster. However, users should be aware that this GUI interface is currently limited to only receiving UART messages and cannot send messages to configure the mosaic-X5 GNSS module.
Software Limitations
With this software, users will only be able to view the data from the NMEA messages and connect to an NTRIP caster. Users will not be able to configure the mosaic-X5 GNSS module with the built-in console.
Resources
For additional information, users can refer to the following resources for the PyGPSClient software:
Installation
There are a variety of installation methods detailed in the GitHub repository's README.md file. However, we recommend utilizing the pip installation method. Depending on how Python is installed on your computer, one of the following commands should allow users to install the software.
Installation Commands
Tip
This installation method requires an internet connection. Additionally, users will also need administrative privileges (or root access sudo) for the installation.
Connecting to the mosaic-X5
Before users can connect to the SparkPNT RTK Facet mosaic, they will need to specify the settings of the UART port in PyGPSClient. Once configured, users can select the button and PyGPSClient will automatically attempt to connect to the GNSS module.
- Below, is a list of the default settings for
UARTport of the SparkPNT RTK Facet mosaic. These settings should be selected in the configuration menu.

Specify the settings for the UART port in QGNSS.
Default Settings
The UART port of the RTK Facet mosaic will have the following default configuration:
- Baudrate: 115200bps
- Data Bits: 8
- Parity: No
- Stop Bits: 1
- Flow Control: None
-
The system requirements and installation instructions are from the RxTools v22.1.0 user manual. This information may change in later iterations of the software suite. Please refer to the user manual (of the version you are utilizing) for the most accurate information. ↩↩↩
-
Higher data rates will require higher CPU speed and more memory capacity. ↩
-
Users will need administrative privileges to install the RxTools software. ↩↩
-
Users may need to extract the RxTools installation files from the downloaded, compressed file. ↩↩
-
Please see the release notes for the issues and limitations of the RxTools applications. ↩
-
Requires
cprivileges. ↩ -
Changing these permissions also requires
rootprivileges. ↩