Smart Watch Example
Smart Watch Example Libraries
The smart watch demo requires three Arduino libraries for the three Qwiic breakouts used in it. Install the libraries through Arduino's Library Manager Tool by searching for the following: "Micro OLED Breakout", "SparkFun Qwiic RTC RV1805", and "SparkFun BMA400". Users who prefer to install them manually can download ZIP folders of the libraries by clicking the buttons below:
Upload Demo Code
With the Qwiic Pocket Dev Board smart watch assembled, board definitions and libraries installed, we can upload the smart watch code to the Qwiic Pocket Development board. Copy the code below into a blank sketch or you can download it from the GitHub repository.
Smart Watch Demo
// Inlcude libraries needed
#include <Wire.h>
#include "SparkFun_BMA400_Arduino_Library.h"
#include <SparkFun_Qwiic_OLED.h>
#include <SparkFun_RV1805.h>
#include <WiFi.h>
#include "time.h"
// WiFi SSID and password, change these for your WiFi network!
const char* ssid = "your-ssid";
const char* password = "your-password";
// Create RTC object
RV1805 rtc;
// Create OLED object
QwiicMicroOLED oled;
// Create sensor object
BMA400 accelerometer;
// Pin used for button input
int buttonPin = 9;
// Pin used for measuring battery voltage
int batteryPin = 1;
// Pin used for interrupt detection
int interruptPin = 4;
// Flag to know when interrupts occur
volatile bool interruptOccurred = false;
// Flag to know when user input is requested
bool userInput = true;
// Screen index
uint8_t screenIndex = 0;
// Enum to define various screen indices
typedef enum
{
SCREEN_CLOCK,
SCREEN_STEP_COUNTER,
SCREEN_BATTERY_VOLTAGE,
SCREEN_SYNC_RTC,
SCREEN_MAX
} screen_index_t;
// Screen size properties
uint8_t midX = 0;
uint8_t midY = 0;
uint8_t clockRadius = 0;
uint8_t rowHeight = 0;
// Screen display flags
volatile bool updateScreen = true;
volatile bool screenOn = true;
// Screen update timer
uint32_t lastUpdateTime = 0;
uint32_t updateInterval = 1000/25;
// Sleep timer to automatically enter deep sleep after inactivity
uint32_t sleepTimerStart = 0;
uint32_t sleepTimerPeriod = 60000;
// Standard time zone relative to GMT (not daylight savings!)
int8_t timeZone = -7;
void setup()
{
// Start serial
Serial.begin(115200);
Serial.println("Watch demo begin!");
// Configure button pin as input with pullup
pinMode(buttonPin, INPUT_PULLUP);
// Configure battery pin as input
pinMode(batteryPin, INPUT);
// The ESP32-C6 has an attenuator on the ADC, which defaults to 11dB. This causes the resolution to be reduced
analogSetAttenuation(ADC_0db);
// Begin I2C driver
Wire.begin(6, 7);
// Begin RTC
while(!rtc.begin())
{
Serial.println("Error: RTC not connected, check wiring and I2C address!");
delay(1000);
}
Serial.println("RTC connected!");
// Manually set time (uncomment if needed, set current time and upload, then comment out and upload again)
// rtc.setTime(0,second,minute,hour,day,month,year,weekday);
// Begin OLED
while(!oled.begin())
{
Serial.println("Error: OLED not connected, check wiring and I2C address!");
delay(1000);
}
Serial.println("OLED connected!");
// Set screen size parameters
midX = oled.getWidth() / 2;
midY = oled.getHeight() / 2;
clockRadius = min(midX, midY) - 2;
rowHeight = oled.getHeight() / 3;
// Begin accelerometer
while(accelerometer.beginI2C() != BMA400_OK)
{
Serial.println("Error: BMA400 not connected, check wiring and I2C address!");
delay(1000);
}
Serial.println("BMA400 connected!");
// Set up tap detection
bma400_tap_conf tapConfig =
{
.axes_sel = BMA400_TAP_Z_AXIS_EN, // Which axes to evaluate for interrupts (X/Y/Z in any combination)
.sensitivity = BMA400_TAP_SENSITIVITY_7, // Sensitivity threshold, up to 7 (lower is more sensitive)
.tics_th = BMA400_TICS_TH_6_DATA_SAMPLES, // Max time between top/bottom peaks of a single tap
.quiet = BMA400_QUIET_60_DATA_SAMPLES, // Minimum time between taps to trigger interrupt
.quiet_dt = BMA400_QUIET_DT_4_DATA_SAMPLES, // Minimum time between 2 taps to trigger double tap interrupt
.int_chan = BMA400_INT_CHANNEL_1 // Which pin to use for interrupts
};
accelerometer.setTapInterrupt(&tapConfig);
// Set up generic 1 interrupt, used to detect when device is rotated away from user
bma400_gen_int_conf genConfig =
{
.gen_int_thres = 125, // 8mg resolution (eg. gen_int_thres=5 results in 40mg)
.gen_int_dur = 100, // 10ms resolution (eg. gen_int_dur=5 results in 50ms)
.axes_sel = BMA400_AXIS_XYZ_EN, // Which axes to evaluate for interrupts (X/Y/Z in any combination)
.data_src = BMA400_DATA_SRC_ACCEL_FILT_LP, // Which filter to use (must be 100Hz, datasheet recommends filter 2)
.criterion_sel = BMA400_ACTIVITY_INT, // Trigger interrupts when active or inactive
.evaluate_axes = BMA400_ANY_AXES_INT, // Logical combining of axes for interrupt condition (OR/AND)
.ref_update = BMA400_UPDATE_MANUAL, // Whether to automatically update reference values
.hysteresis = BMA400_HYST_96_MG, // Hysteresis acceleration for noise rejection
.int_thres_ref_x = (uint16_t) -360, // Raw 12-bit acceleration value
.int_thres_ref_y = 0, // Raw 12-bit acceleration value
.int_thres_ref_z = 360, // Raw 12-bit acceleration value (at 4g range (default), 512 = 1g)
.int_chan = BMA400_INT_CHANNEL_1 // Which pin to use for interrupts
};
accelerometer.setGeneric1Interrupt(&genConfig);
// Set up generic 2 interrupt, used to detect when device is rotated towards user
genConfig.gen_int_thres = 50;
genConfig.gen_int_dur = 50;
genConfig.criterion_sel = BMA400_INACTIVITY_INT;
genConfig.evaluate_axes = BMA400_ALL_AXES_INT;
accelerometer.setGeneric2Interrupt(&genConfig);
// Enable step counting
bma400_step_int_conf stepConfig = {.int_chan = BMA400_INT_CHANNEL_1};
accelerometer.setStepCounterInterrupt(&stepConfig);
// Set INT 1 pin as push pull active high
accelerometer.setInterruptPinMode(BMA400_INT_CHANNEL_1, BMA400_INT_PUSH_PULL_ACTIVE_1);
// Enable interrupts from accelerometer
accelerometer.enableInterrupt(BMA400_STEP_COUNTER_INT_EN, true);
accelerometer.enableInterrupt(BMA400_SINGLE_TAP_INT_EN, true);
accelerometer.enableInterrupt(BMA400_DOUBLE_TAP_INT_EN, true);
accelerometer.enableInterrupt(BMA400_GEN1_INT_EN, true);
accelerometer.enableInterrupt(BMA400_GEN2_INT_EN, true);
accelerometer.enableInterrupt(BMA400_LATCH_INT_EN, true);
// Attach interrupt handler
pinMode(interruptPin, INPUT);
attachInterrupt(digitalPinToInterrupt(interruptPin), bma400InterruptHandler, RISING);
// Reset sleep timer
sleepTimerStart = millis();
}
void loop()
{
// Check if we need to enter deep sleep
if((digitalRead(buttonPin) == LOW) || (millis() > (sleepTimerStart + sleepTimerPeriod)))
{
enterDeepSleep();
}
// Check whether interrupt triggered from accelerometer
if(interruptOccurred)
{
// Reset interrupt flag
interruptOccurred = false;
// Reset sleep timer
sleepTimerStart = millis();
Serial.print("Interrupt occured: ");
// Check what the interrupt source was
uint16_t interruptStatus = 0;
accelerometer.getInterruptStatus(&interruptStatus);
if(interruptStatus & BMA400_ASSERTED_S_TAP_INT)
{
// Single tap, increment screen index if screen is on
if(screenOn)
{
Serial.println("Single tap");
screenIndex++;
updateScreen = true;
}
}
else if(interruptStatus & BMA400_ASSERTED_D_TAP_INT)
{
// Double tap used for input within a screen index, if applicable.
// This always follows a single tap, so decrement screen index and
// set input flag, if screen is on
if(screenOn)
{
Serial.println("Double tap");
screenIndex--;
updateScreen = true;
userInput = true;
}
}
else if(interruptStatus & BMA400_ASSERTED_GEN1_INT)
{
// Generic 1 indicates the device was rotated away from the user, in
// which case we'll turn the screen off
Serial.println("Generic 1");
screenOn = false;
oled.erase();
oled.display();
// The generic interrupts trigger constantly. Disable generic 1, and
// enable generic 2
accelerometer.enableInterrupt(BMA400_GEN1_INT_EN, false);
accelerometer.enableInterrupt(BMA400_GEN2_INT_EN, true);
}
else if(interruptStatus & BMA400_ASSERTED_GEN2_INT)
{
// Generic 2 indicates the device was rotated towards the user, in
// which case we'll turn the screen on
Serial.println("Generic 2");
screenOn = true;
updateScreen = true;
// The generic interrupts trigger constantly. Disable generic 2, and
// enable generic 1
accelerometer.enableInterrupt(BMA400_GEN1_INT_EN, true);
accelerometer.enableInterrupt(BMA400_GEN2_INT_EN, false);
}
else if(interruptStatus & BMA400_ASSERTED_STEP_INT)
{
// Step counter incremented, update the screen to give live count
Serial.println("Step");
updateScreen = true;
}
else
{
// Unknown source, just print and ignore it
Serial.println("Unknown interrupt");
Serial.println(interruptStatus, HEX);
}
}
// Figure out what to display on the screen, if anything
if(screenOn)
{
screenIndex %= SCREEN_MAX;
switch(screenIndex)
{
case SCREEN_CLOCK:
displayClock();
break;
case SCREEN_STEP_COUNTER:
displayStepCounter();
break;
case SCREEN_BATTERY_VOLTAGE:
displayBatteryVoltage();
break;
case SCREEN_SYNC_RTC:
displaySyncRTC();
break;
default:
// Shouldn't get here, but just in case
screenIndex = 0;
break;
}
}
// Reset flags
userInput = false;
}
// Displays time an analog clock style
void displayClock()
{
// Check if we need to update the screen. Uses a timer to limit refresh rate
if(!updateScreen)
{
if(millis() >= (lastUpdateTime + updateInterval))
{
lastUpdateTime += updateInterval;
}
else
{
return;
}
}
updateScreen = false;
// Get current time from RTC
rtc.updateTime();
int timeMilli = millis() % 1000;
int timeSecs = rtc.getSeconds();
int timeMins = rtc.getMinutes();
int timeHours = rtc.getHours() % 12;
// Clear OLED
oled.erase();
// Draw circle to define clock face
oled.circle(midX, midY, clockRadius);
// Draw a solid circle to indicate 1 second intervals
int x = (clockRadius+1) * sin(timeMilli * 2*PI/1000);
int y = (clockRadius+1) *-cos(timeMilli * 2*PI/1000);
oled.circleFill(midX + x, midY + y, 2);
// Draw second hand
x = clockRadius * sin(timeSecs * 2*PI/60);
y = clockRadius *-cos(timeSecs * 2*PI/60);
oled.line(midX, midY, midX + x, midY + y);
// Draw minute hand
x = clockRadius*.75 * sin(timeMins * 2*PI/60);
y = clockRadius*.75 *-cos(timeMins * 2*PI/60);
oled.line(midX, midY, midX + x, midY + y);
// Draw hour hand
x = clockRadius*.5 * sin(timeHours * 2*PI/12);
y = clockRadius*.5 *-cos(timeHours * 2*PI/12);
oled.line(midX, midY, midX + x, midY + y);
// Display on the OLED
oled.display();
}
// Displays step count
void displayStepCounter()
{
// Check if screen needs to be updated
if(!updateScreen)
return;
updateScreen = false;
// Create text buffer
char displayStr[10] = {0};
uint8_t numChars = 0;
// Get step count and activity type from accelerometer
uint32_t stepCount = 0;
uint8_t activityType = 0;
accelerometer.getStepCount(&stepCount, &activityType);
// Clear screen
oled.erase();
// Print header
numChars = sprintf(displayStr, "Steps");
printRow(0, displayStr, numChars);
// Print number of steps
numChars = sprintf(displayStr, "%li", stepCount);
printRow(1, displayStr, numChars);
// Print activity type
switch(activityType)
{
case BMA400_RUN_ACT:
numChars = sprintf(displayStr, "Running");
break;
case BMA400_WALK_ACT:
numChars = sprintf(displayStr, "Walking");
break;
case BMA400_STILL_ACT:
numChars = sprintf(displayStr, "Standing");
break;
default:
numChars = sprintf(displayStr, "Unknown");
break;
}
printRow(2, displayStr, numChars);
// Display on OLED
oled.display();
}
// Displays battery voltage
void displayBatteryVoltage()
{
// Check if screen needs to be updated
if(!updateScreen)
return;
updateScreen = false;
// Create text buffer
char displayStr[10] = {0};
uint8_t numChars = 0;
// Clear screen
oled.erase();
// Print header
numChars = sprintf(displayStr, "Battery");
printRow(0, displayStr, numChars);
numChars = sprintf(displayStr, "Voltage");
printRow(1, displayStr, numChars);
// Measure battery voltage, averaged over several samples
uint8_t numSamples = 100;
uint32_t batteryRaw = 0;
for(uint8_t i = 0; i < numSamples; i++)
{
batteryRaw += analogRead(batteryPin);
}
float voltage = 3.3 / 4095 * batteryRaw / numSamples;
// Measured voltage is less than true battery voltage, partly because of the
// voltage divider circuit, and partly because the ADC has a non-zero input
// current. This scaler was experimentally found to correct these effects,
// though the nominal value may differ between boards
voltage *= 1.688;
// Print battery voltage
numChars = sprintf(displayStr, "%.3fV", voltage);
printRow(2, displayStr, numChars);
// Display on OLED
oled.display();
}
void displaySyncRTC()
{
// Check if screen needs to be updated
if(!updateScreen)
return;
updateScreen = false;
// Create text buffer
char displayStr[10] = {0};
uint8_t numChars = 0;
// Clear screen
oled.erase();
// Print RTC sync message
numChars = sprintf(displayStr, "Sync RTC");
printRow(0, displayStr, numChars);
numChars = sprintf(displayStr, "with NTP?");
printRow(1, displayStr, numChars);
// Display on OLED
oled.display();
// Check if user requested to synchronize RTC
if(userInput)
{
// Clear screen
oled.erase();
// Print RTC sync message
numChars = sprintf(displayStr, "Syncing");
printRow(0, displayStr, numChars);
numChars = sprintf(displayStr, "RTC...");
printRow(1, displayStr, numChars);
// Display on OLED
oled.display();
// Start connecting to WiFi network
WiFi.begin(ssid, password);
while(WiFi.status() != WL_CONNECTED)
{
Serial.println("Connecting to WiFi...");
delay(1000);
}
// Sync with an NTP server
configTime(timeZone * 3600, 3600, "pool.ntp.org");
// Disconnect WiFi
WiFi.disconnect(true);
WiFi.mode(WIFI_OFF);
// Get updated time
struct tm timeinfo;
getLocalTime(&timeinfo);
// Set RTC to current time
uint8_t time[TIME_ARRAY_LENGTH];
time[TIME_HUNDREDTHS] = rtc.DECtoBCD(millis());
time[TIME_SECONDS] = rtc.DECtoBCD(timeinfo.tm_sec);
time[TIME_MINUTES] = rtc.DECtoBCD(timeinfo.tm_min);
time[TIME_HOURS] = rtc.DECtoBCD(timeinfo.tm_hour);
time[TIME_DATE] = rtc.DECtoBCD(timeinfo.tm_mday);
time[TIME_MONTH] = rtc.DECtoBCD(timeinfo.tm_mon);
time[TIME_YEAR] = rtc.DECtoBCD(timeinfo.tm_year);
time[TIME_DAY] = rtc.DECtoBCD(timeinfo.tm_wday);
rtc.setTime(time, TIME_ARRAY_LENGTH);
// Clear screen
oled.erase();
// Print RTC sync message
numChars = sprintf(displayStr, "RTC");
printRow(0, displayStr, numChars);
numChars = sprintf(displayStr, "Synced!");
printRow(1, displayStr, numChars);
// Display on OLED
oled.display();
}
}
// Helper function to display text on rows 0-2
void printRow(uint8_t row, char* text, uint8_t numChars)
{
// Set cursor location so text is centered
oled.setCursor(midX - 5 * numChars / 2, rowHeight * row);
// Print text at cursor location
oled.print(text);
}
// Helper function to minimuze total current consumption and enter deep sleep
void enterDeepSleep()
{
// Turn off display
oled.erase();
oled.display();
oled.displayPower(false);
// Minimize current consumption of RTC
rtc.enableLowPower();
rtc.enableSleep();
rtc.writeRegister(RV1805_CTRL1, 0x77);
// Disable accelerometer interrupts, except double tap
accelerometer.enableInterrupt(BMA400_STEP_COUNTER_INT_EN, false);
accelerometer.enableInterrupt(BMA400_SINGLE_TAP_INT_EN, false);
// accelerometer.enableInterrupt(BMA400_DOUBLE_TAP_INT_EN, false);
accelerometer.enableInterrupt(BMA400_GEN1_INT_EN, false);
accelerometer.enableInterrupt(BMA400_GEN2_INT_EN, false);
// Could have had a new interrupt fire, read status to clear old interrupts
uint16_t interruptStatus = 0;
accelerometer.getInterruptStatus(&interruptStatus);
// Set interrupt pin as wakeup source
esp_deep_sleep_enable_gpio_wakeup(BIT(interruptPin), ESP_GPIO_WAKEUP_GPIO_HIGH);
// Enter deep sleep. This never returns, instead the code restarts entirely
esp_deep_sleep_start();
}
// ISR for accelerometer interrupts
void bma400InterruptHandler()
{
// Set flag to be evaluated later
interruptOccurred = true;
}
Now select the board (SparkFun ESP32-C6 Qwiic Pocket) and the Port and click the "Upload" button. Once the code finishes uploading, you should see a clock display on the Qwiic Micro OLED screen.
Code to Note
The code has a few settings users should take note of to get the most out of the smart watch demo. Let's take a closer look.
BMA400 Settings
The code sets several thresholds on the BMA400 for tap/double-tap detection, step counting, and tilt-thresholds to fairly generous values to make all of the motion actions easy to trigger but some may find these to be too easily triggered. The code sets the BMA400's tap detection sensitivity to the max value (7) so if you want to make it less sensitive adjust this line:
NTP Configuration
Syncing the RTC to a NTP (Network Time Protocol) server requires an internet connection. The code has placeholders for these values so you'll need to enter your network credentials in the section of code shown below:
Smart Watch Actions
The smart watch code includes a bunch of motion-triggered actions to change the OLED display so let's take a closer look at them to make sure we get the most out of our smart watch.
Deep Sleep Wake & Return
The code tells the circuit to enter deep sleep on two conditions: 60 seconds of inactivity or pressing the BOOT button on the bottom of the Qwiic Development Board. Double-tapping the watch wakes it from deep sleep and turns on the OLED to display the last screen viewed (default after upload is the analog clock).
Tilt Functions
The OLED display is off by default to help conserve battery power. It enables the display when you're "checking your watch" so try tilting it in "towards" you with the OLED screen upright (ribbon cable on the bottom) and the display should turn on like the photo below:
Tilt the screen "away" to turn the screen back off. Otherwise, screen should return to deep sleep after 60 seconds of inactivity (ie. no tilts or taps).
Tap Menu Options
When the OLED is active you can tap on the screen (or just trigger a tap action for the BMA400 like setting the watch down or a similar action) to cycle through the four display options: Clock, Step Counter, Battery Voltage, and Sync with NTP Server.
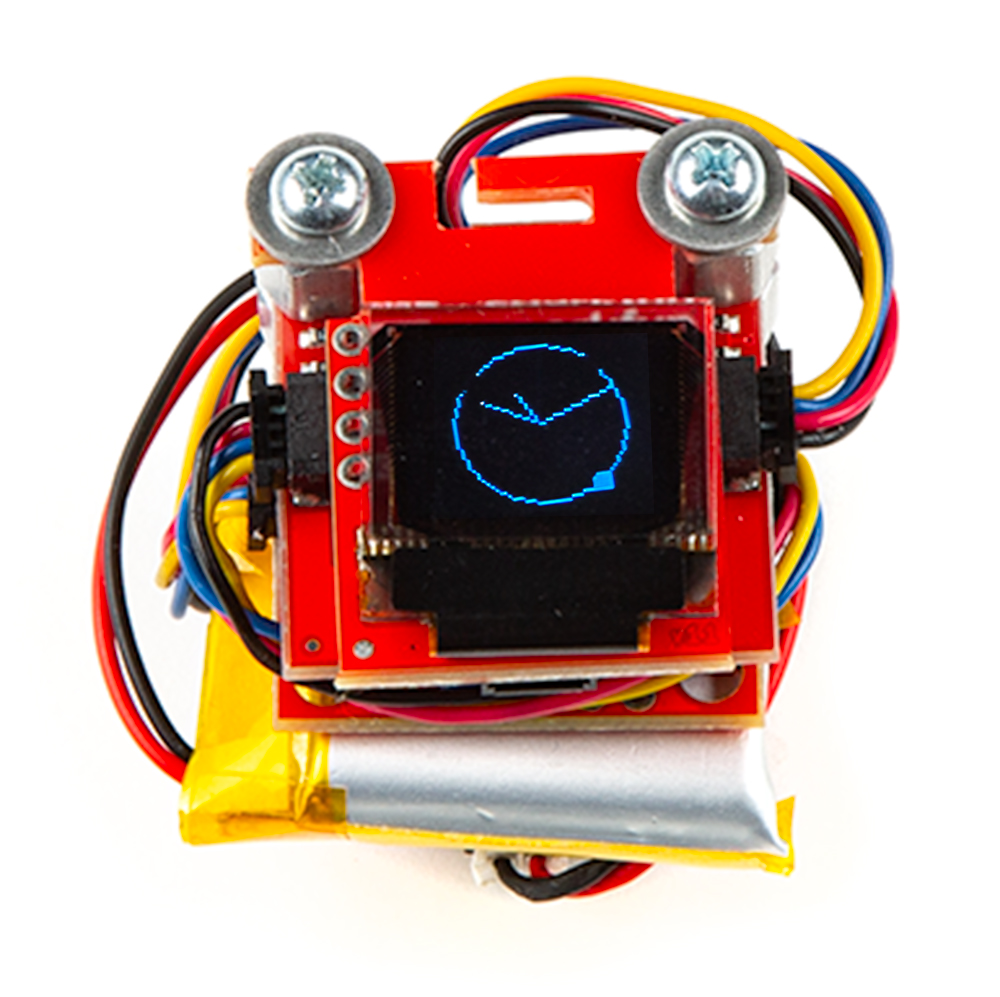
Analog Clock
This display is a simple analog clock interface without hour markings. It also features a nifty second counter signified by a dot travelling around the clock face.
Step Counter
The smart watch code also takes advantage of the BMA400's built-in step counting feature. It displays steps counted as well as the current action: Standing, Walking, and Running.

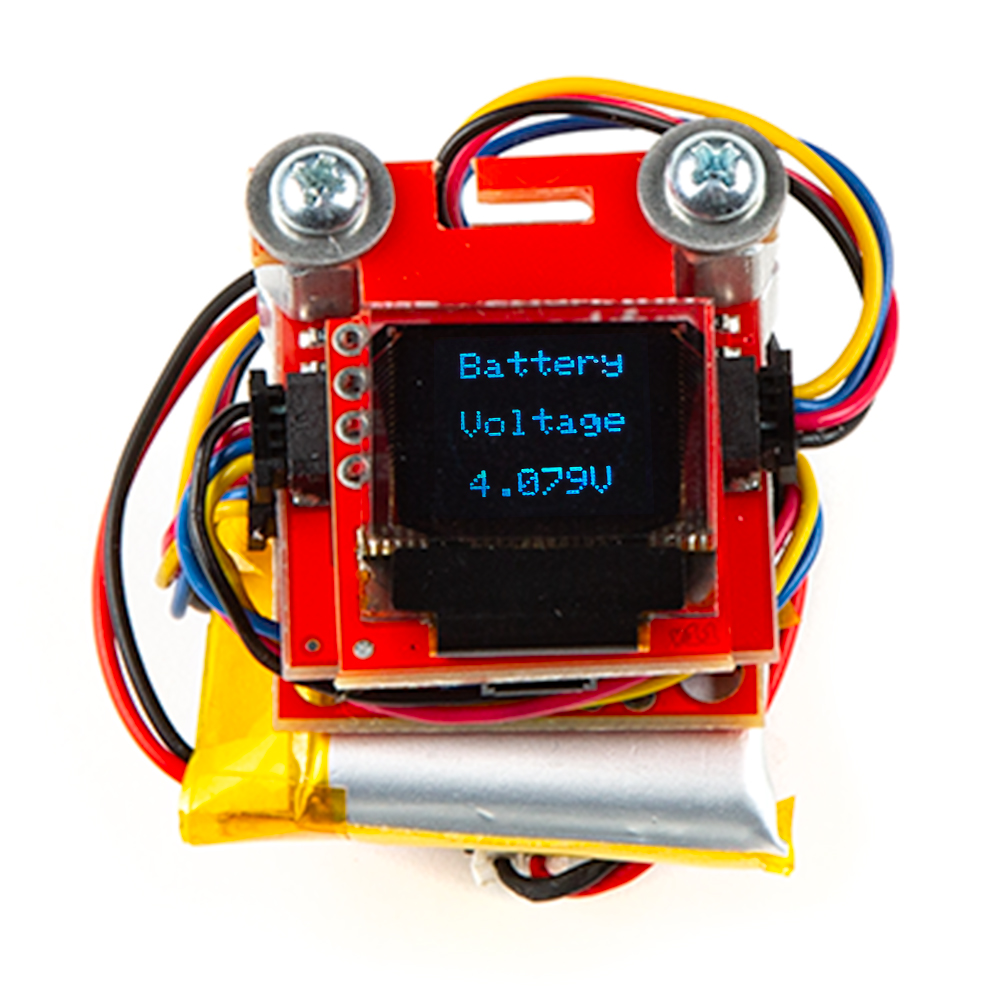
Battery Voltage
The third screen option shows the remaining battery voltage of a connected battery voltage to keep track of remaining charge on of an attached battery.
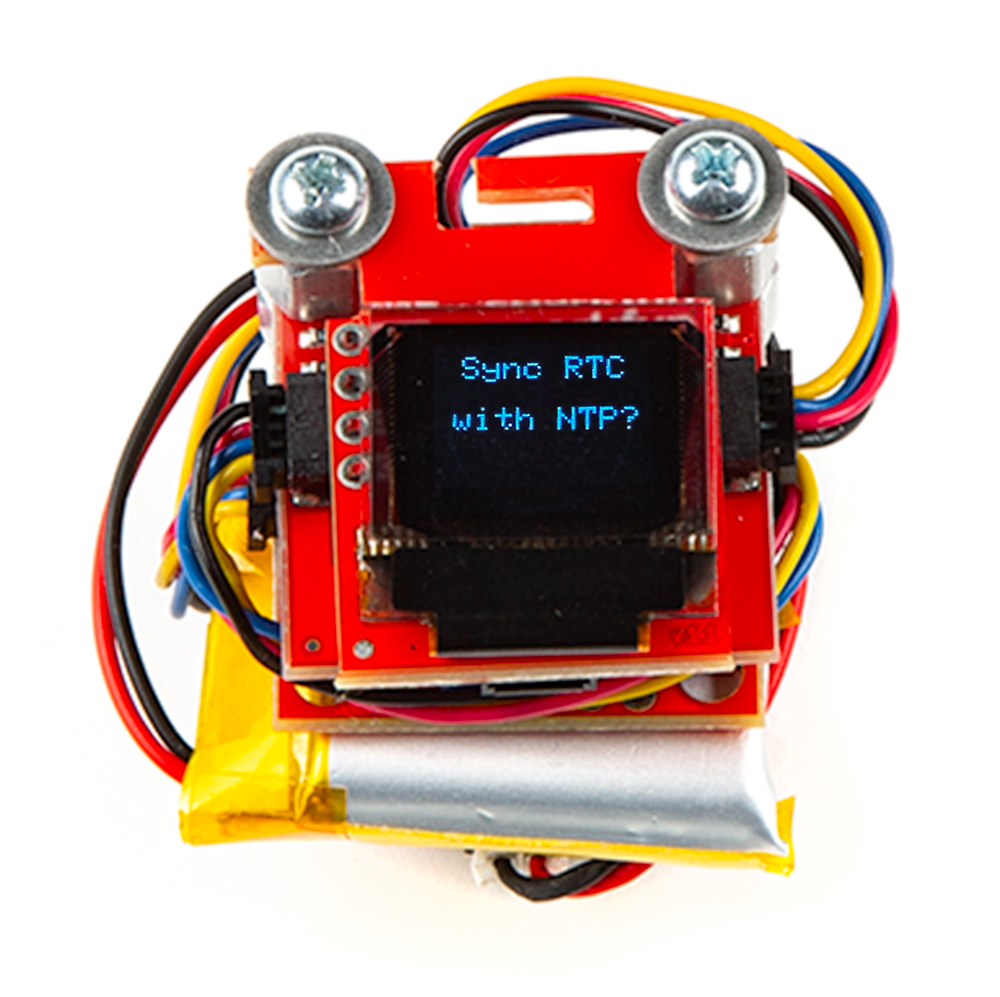
Sync with NTP Server
The last display option lets you remotely sync the RTC with an NTP (assuming it has a WiFi connection) by double-tapping the display when "Sync with NTP Server" is displayed.