GNSS Menu
Surveyor: ![]() / Express:
/ Express: ![]() / Express Plus:
/ Express Plus: ![]() / Facet:
/ Facet: ![]() / Facet L-Band:
/ Facet L-Band: ![]() / Reference Station:
/ Reference Station: ![]()
The ZED-F9P is immensely configurable. The RTK device will, by default, put the ZED-F9P into the most common configuration for rover/base RTK for use with SW Maps and other GIS applications.
The GNSS Configuration menu allows a user to change the report rate, dynamic model, and select which constellations should be used for fix calculations.
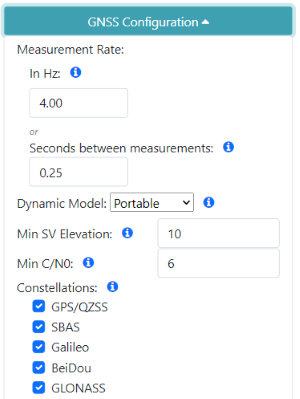
The most common settings on the RTK Device WiFi AP Config
From the main menu, pressing 1 will bring up the GNSS configuration menu.
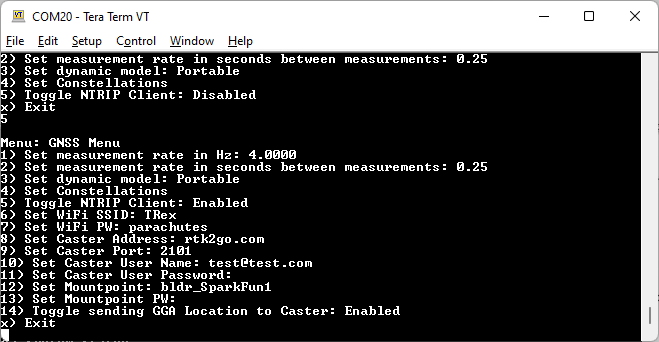
GNSS menu showing measurement rates and dynamic model
Measurement Frequency
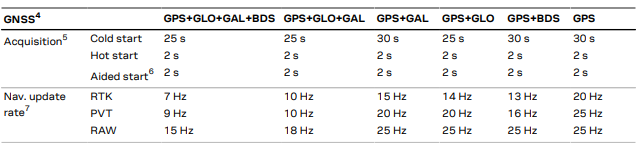
Measurement Frequency can be set by either Hz or by seconds between measurements. Some users need many measurements per second; RTK devices support up to 20Hz with RTK enabled. Some users are doing very long static surveys that require many seconds between measurements; the ZED-F9P supports up to 8255 seconds (137 minutes) between readings.
Note: When in Base mode, the measurement frequency is set to 1Hz. This is because RTK transmission does not benefit from faster updates, nor does logging of RAWX for PPP.
Dynamic Model
The Dynamic Model can be changed but it is recommended to leave it as Portable. For more information, please refer to the ZED-F9P Integration Manual.
Min SV Elevation and C/N0
GNSS menu showing Minimum SV Elevation and C/N0
A minimum elevation is set in degrees. If a satellite is detected that is below this elevation, it will be excluded from any GNSS position calculation.
A minimum C/N0 is set in dB. If a satellite is detected that is below this signal strength, it will be excluded from any GNSS position calculation.
Constellations Menu
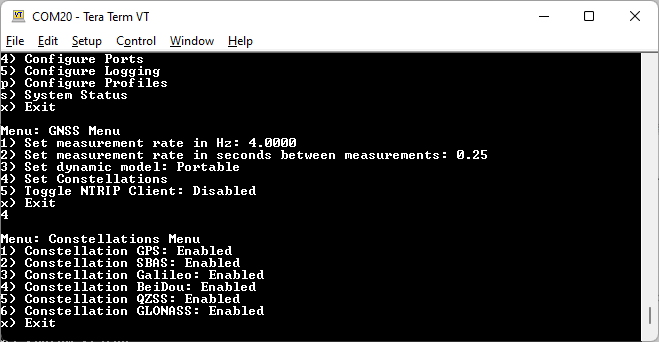
Enable or disable the constellations used for fixes
The ZED-F9P is capable of tracking 184 channels across four constellations and two bands (L1/L2) including GPS (USA), Galileo (EU), BeiDou (China), and GLONASS (Russia). SBAS (satellite-based augmentation system) is also supported. By default, all constellations are used. Some users may want to study, log, or monitor a subset. Disabling a constellation will cause the ZED to ignore those signals when calculating a location fix.
NTRIP Client
NTRIP Client enabled showing settings
The SparkFun RTK devices can obtain their correction data over a few different methods. For detailed information see Correction Sources.
- Bluetooth - This is the most common. An app running on a tablet or phone has an NTRIP client built into it. Once the phone is connected over Bluetooth SPP, the RTCM is sent from the phone to the RTK device.
- WiFi - The rover uses WiFi to be an NTRIP Client and connect to an NTRIP Caster. WiFi and Bluetooth can run simultaneously. This is helpful in situations where a GIS software does not have an NTRIP Client; a cellular hotspot can be used to provide WiFi to the RTK device setup to use NTRIP Client an obtain RTK Fix, while Bluetooth is used to connect to the GIS software for data mapping and collection.
- Radio - A base RTK unit and a rover have serial radios plugged into the RADIO port. RTCM data generated by the base station is set over the radio to the rover.
Once the NTRIP Client is enabled you will need a handful of credentials:
- Local WiFi SSID and password (WPA2)
- A casting service and port such as RTK2Go or Emlid (the port is almost always 2101)
- A mount point and password
With these credentials set, the RTK device will attempt to connect to WiFi, then connect to your caster of choice, and then begin downloading the RTCM data over WiFi. We tried to make it as easy as possible. Every second a few hundred bytes, up to ~2k, will be downloaded from the mount point you've entered. Remember, the rover must be in WiFi range to connect in this mode.
Rover with Active NTRIP Client Connection
Once the device connects to WiFi, it will attempt to connect to the user's chosen NTRIP Caster. If WiFi or the NTRIP connection fails, the rover will return to normal operation.